const int LED = 13;
void setup()
{
pinMode(LED, OUTPUT);
}
void loop()
{
digitalWrite(LED, HIGH);
delay(1000);
digitalWrite(LED, LOW);
delay(1000);
}
Example 4-1
const int LED = 13;
const int BUTTON = 7;
int val = 0;
void setup() {
pinMode(LED, OUTPUT);
pinMode(BUTTON, INPUT);
}
void loop(){
val = digitalRead(BUTTON);
if (val == HIGH) {
digitalWrite(LED, HIGH);
} else {
digitalWrite(LED, LOW);
}
}
Example 4-2
const int LED = 13;
const int BUTTON = 7;
int val = 0;
int state = 0;
void setup() {
pinMode(LED, OUTPUT);
pinMode(BUTTON, INPUT);
}
void loop() {
val = digitalRead(BUTTON);
if (val == HIGH) {
state = 1 - state;
}
if (state == 1) {
digitalWrite(LED, HIGH);
} else {
digitalWrite(LED, LOW);
}
}
Example 4-3
const int LED = 13;
const int BUTTON = 7;
int val = 0;
int old_val = 0;
int state = 0;
void setup() {
pinMode(LED, OUTPUT);
pinMode(BUTTON, INPUT);
}
void loop(){
val = digitalRead(BUTTON);
if ((val == HIGH) && (old_val == LOW)){
state = 1 - state;
}
old_val = val;
if (state == 1) {
digitalWrite(LED, HIGH);
} else {
digitalWrite(LED, LOW);
}
}
Example 4-4
const int LED = 13;
const int BUTTON = 7;
int val = 0;
int old_val = 0;
int state = 0;
void setup() {
pinMode(LED, OUTPUT);
pinMode(BUTTON, INPUT);
}
void loop(){
val = digitalRead(BUTTON);
if ((val == HIGH) && (old_val == LOW)){
state = 1 - state;
delay(10);
}
old_val = val;
if (state == 1) {
digitalWrite(LED, HIGH);
} else {
digitalWrite(LED, LOW);
}
}
Example 4-5
const int LED = 9;
int i = 0;
void setup() {
pinMode(LED, OUTPUT);
}
void loop(){
for (i = 0; i < 255; i++) {
analogWrite(LED, i);
delay(10);
}
for (i = 255; i > 0; i--) {
analogWrite(LED, i);
delay(10);
}
}
Example 5-1
const int LED = 9;
const int BUTTON = 7;
int val = 0;
int old_val = 0;
int state = 0;
int brightness = 128;
unsigned long startTime = 0;
void setup() {
pinMode(LED, OUTPUT);
pinMode(BUTTON, INPUT);
}
void loop() {
val = digitalRead(BUTTON);
if ((val == HIGH) && (old_val == LOW)) {
state = 1 - state;
startTime = millis();
delay(10);
}
if ((val == HIGH) && (old_val == HIGH)) {
if (state == 1 && (millis() - startTime) > 500) {
brightness++;
delay(10);
if (brightness > 255) {
brightness = 0;
}
}
}
old_val = val;
if (state == 1) {
analogWrite(LED, brightness);
}
else {
analogWrite(LED, 0);
}
}
Example 5-2
const int LED = 13;
int val = 0;
void setup() {
pinMode(LED, OUTPUT);
}
void loop() {
val = analogRead(0);
digitalWrite(LED, HIGH);
delay(val);
digitalWrite(LED, LOW);
delay(val);
}
Example 5-3
const int LED = 9;
int val = 0;
void setup() {
pinMode(LED, OUTPUT);
}
void loop() {
val = analogRead(0);
analogWrite(LED, val/4);
delay(10);
}
Example 5-4
const int SENSOR = 0;
int val = 0;
void setup() {
Serial.begin(9600);
}
void loop() {
val = analogRead(SENSOR);
Serial.println(val);
delay(100);
}
Example 5-5
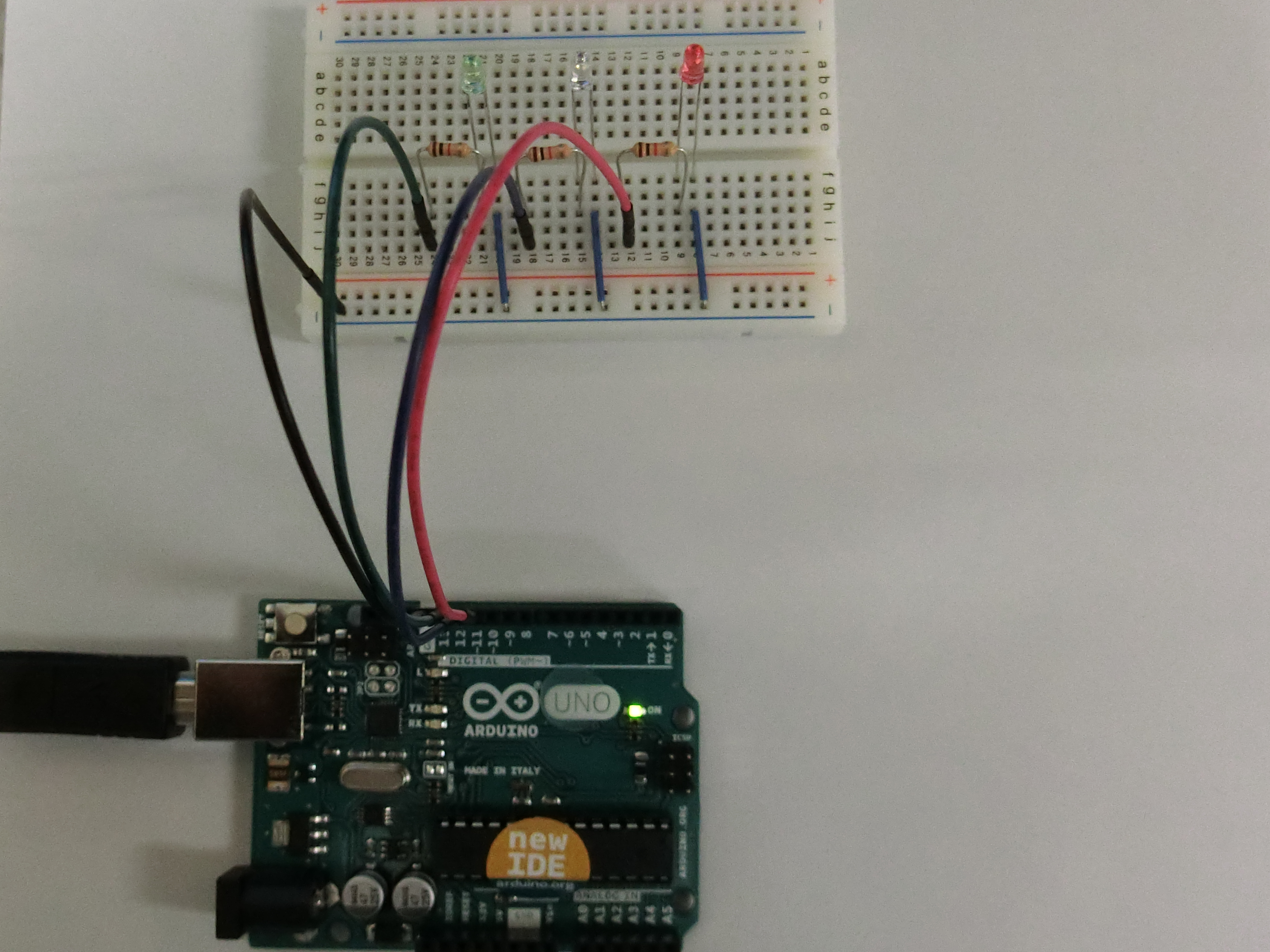
2進数回路

Arduino側
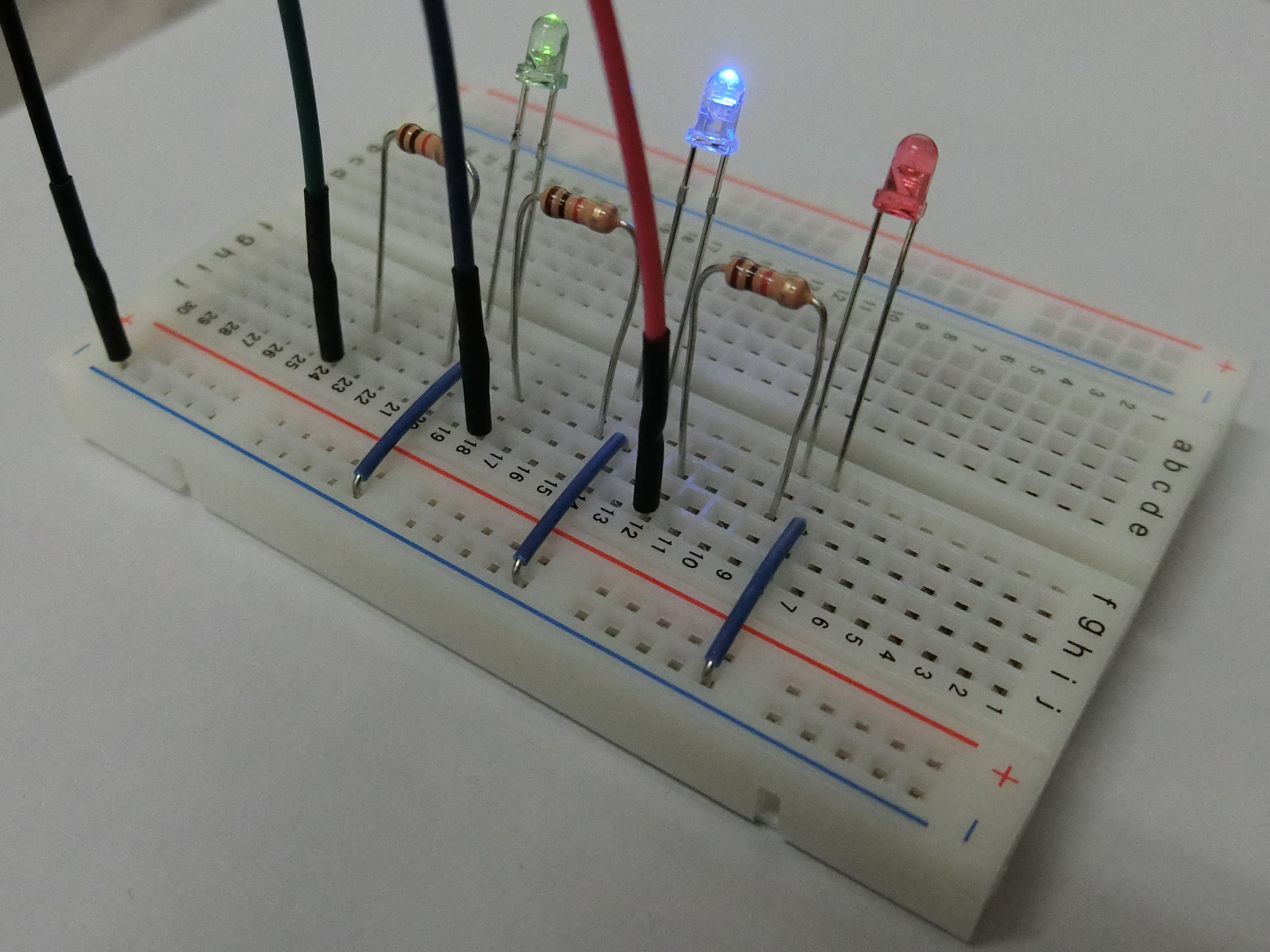
2進数回路
2進数(動画)
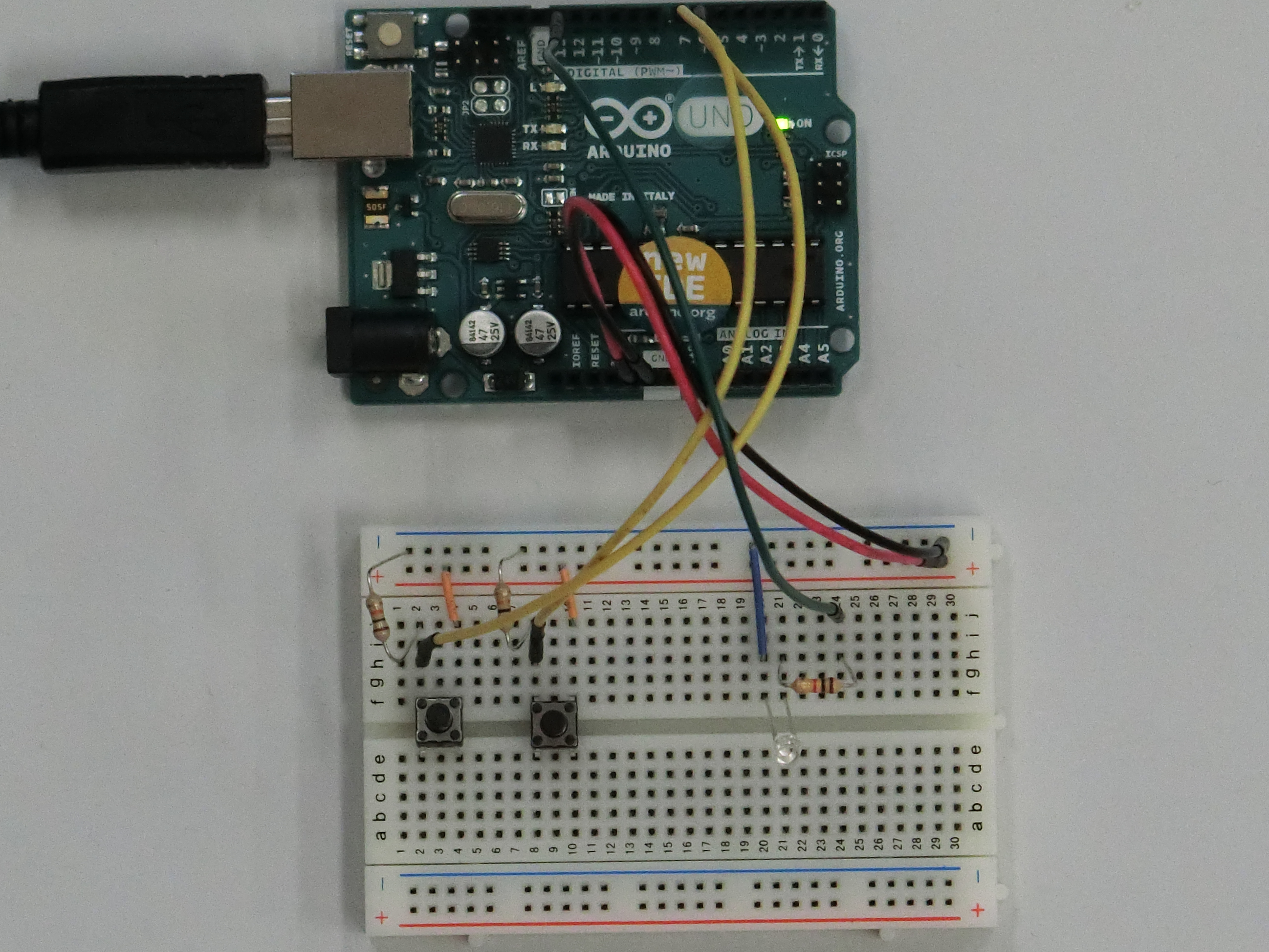
論理演算回路
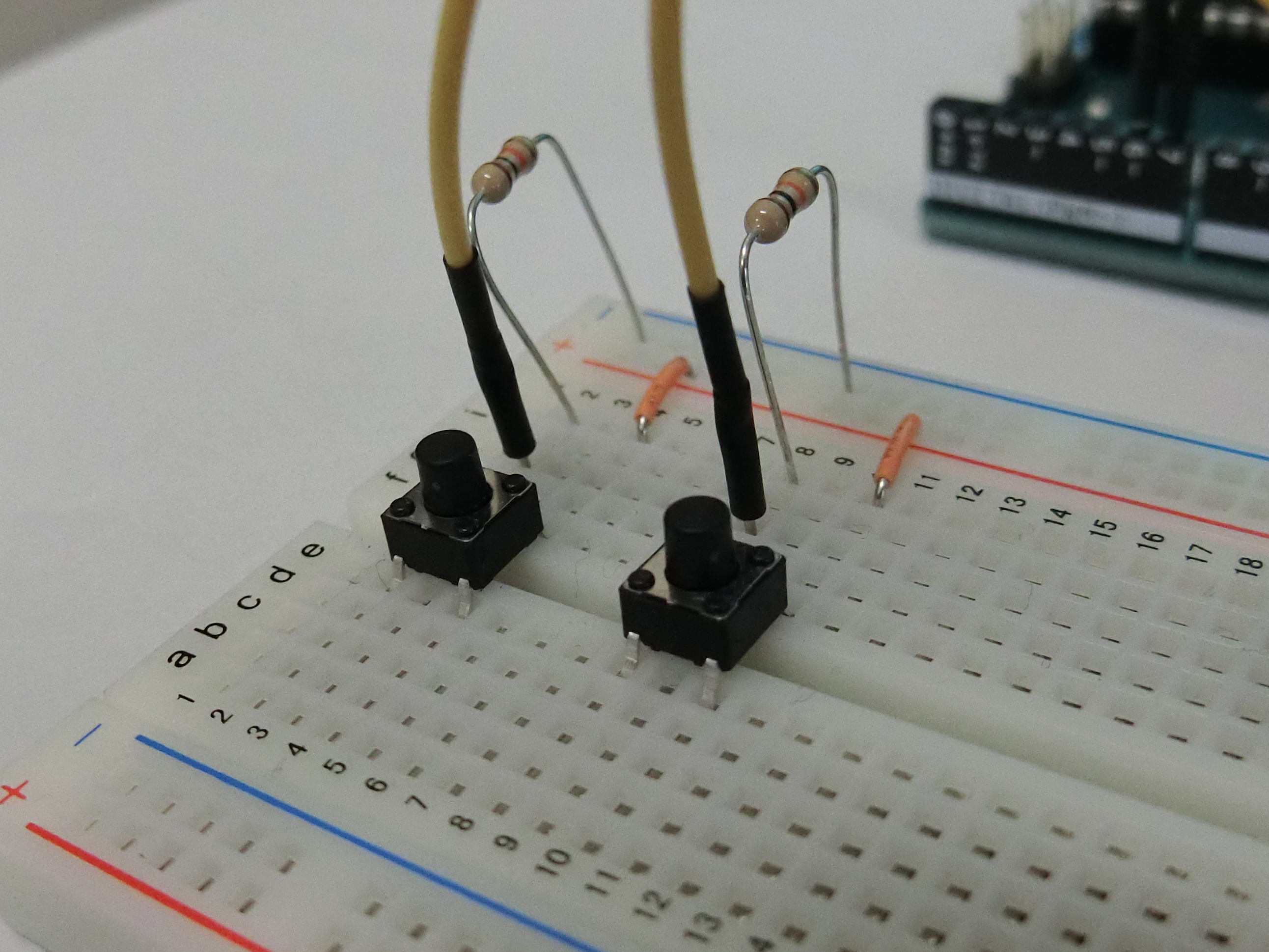
タクトスイッチ側
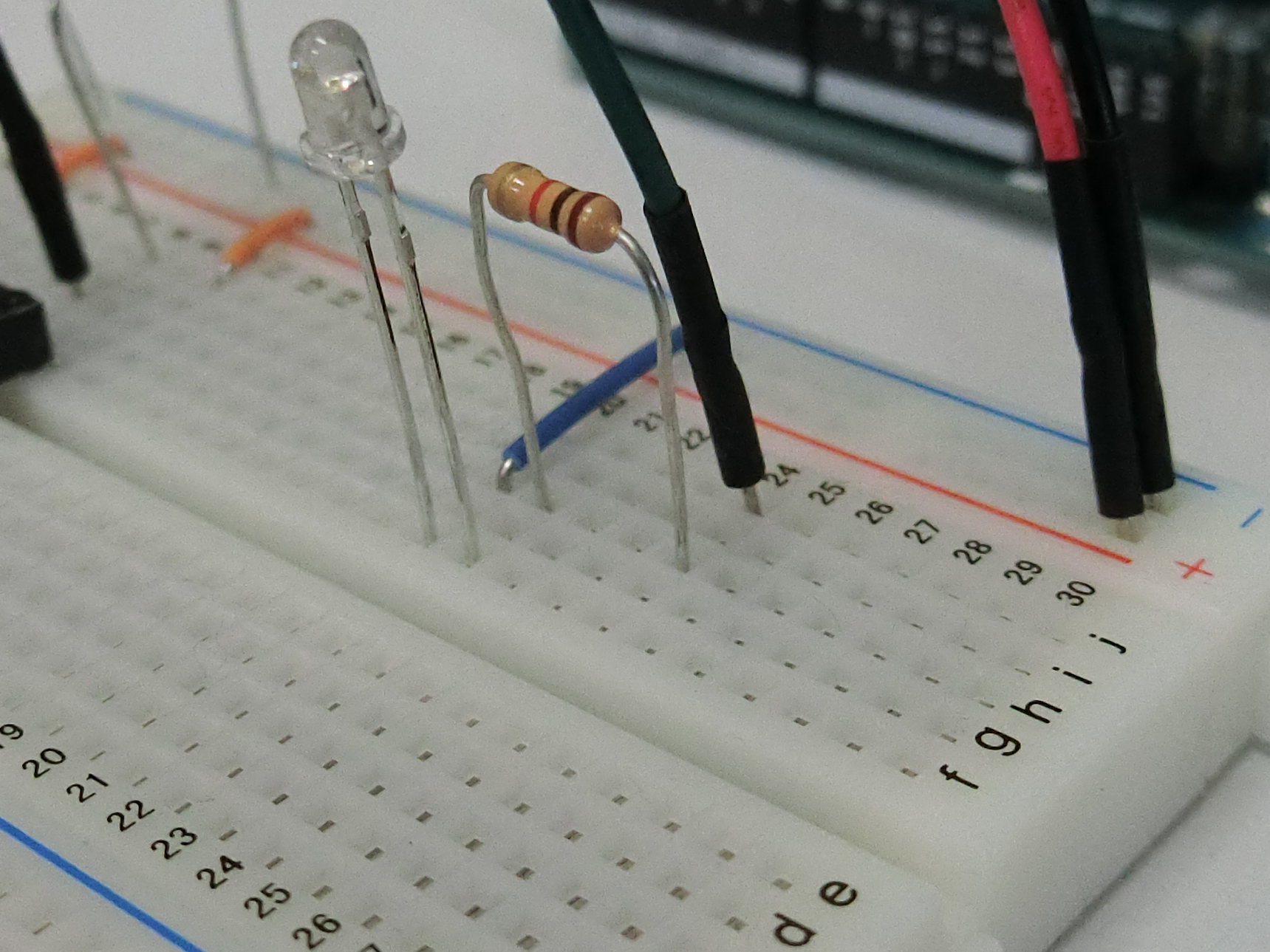
LED側
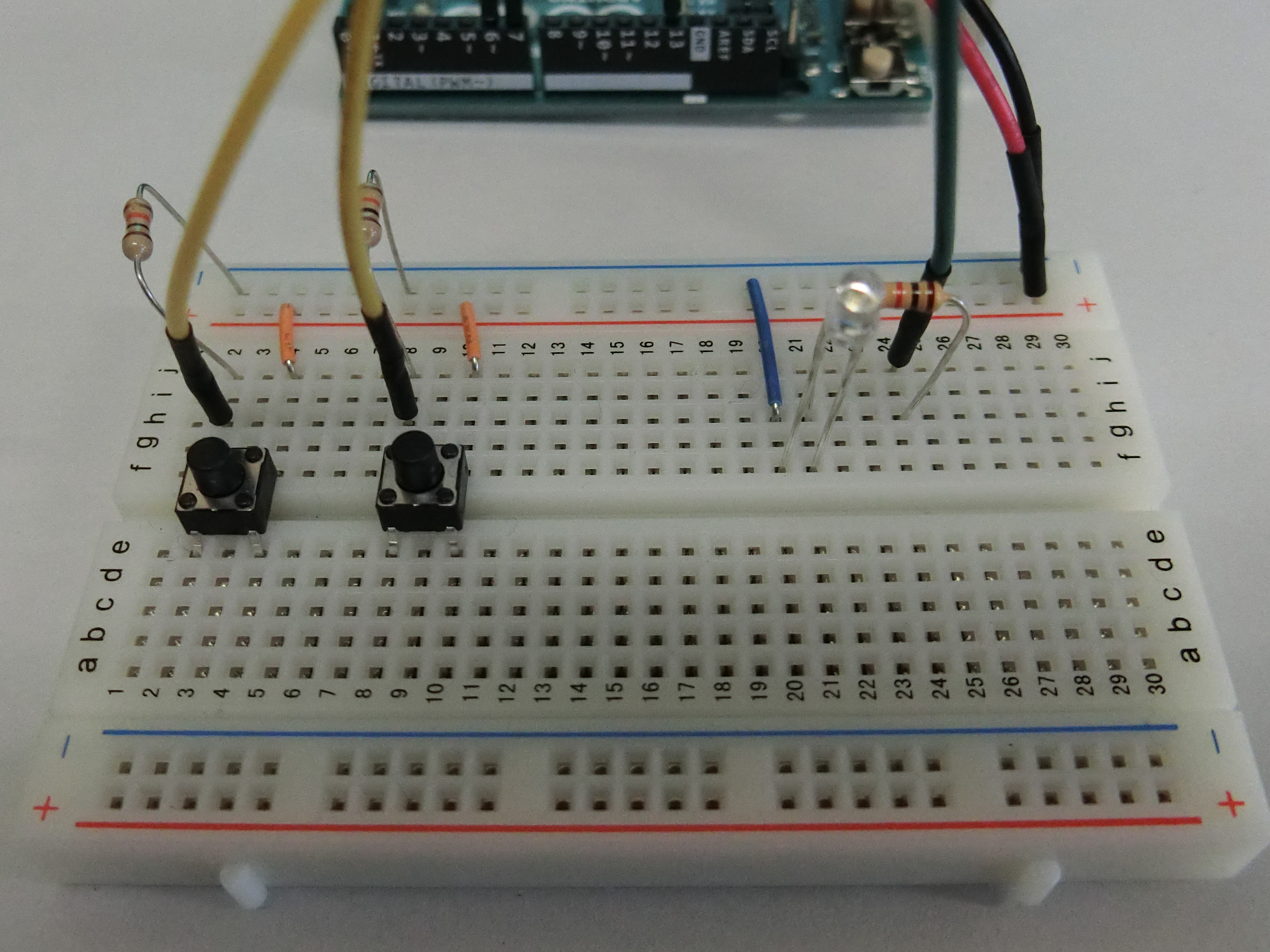
回路
AND(動画)
OR(動画)
NAND(動画)
NOR(動画)
EOR_XOR(動画)
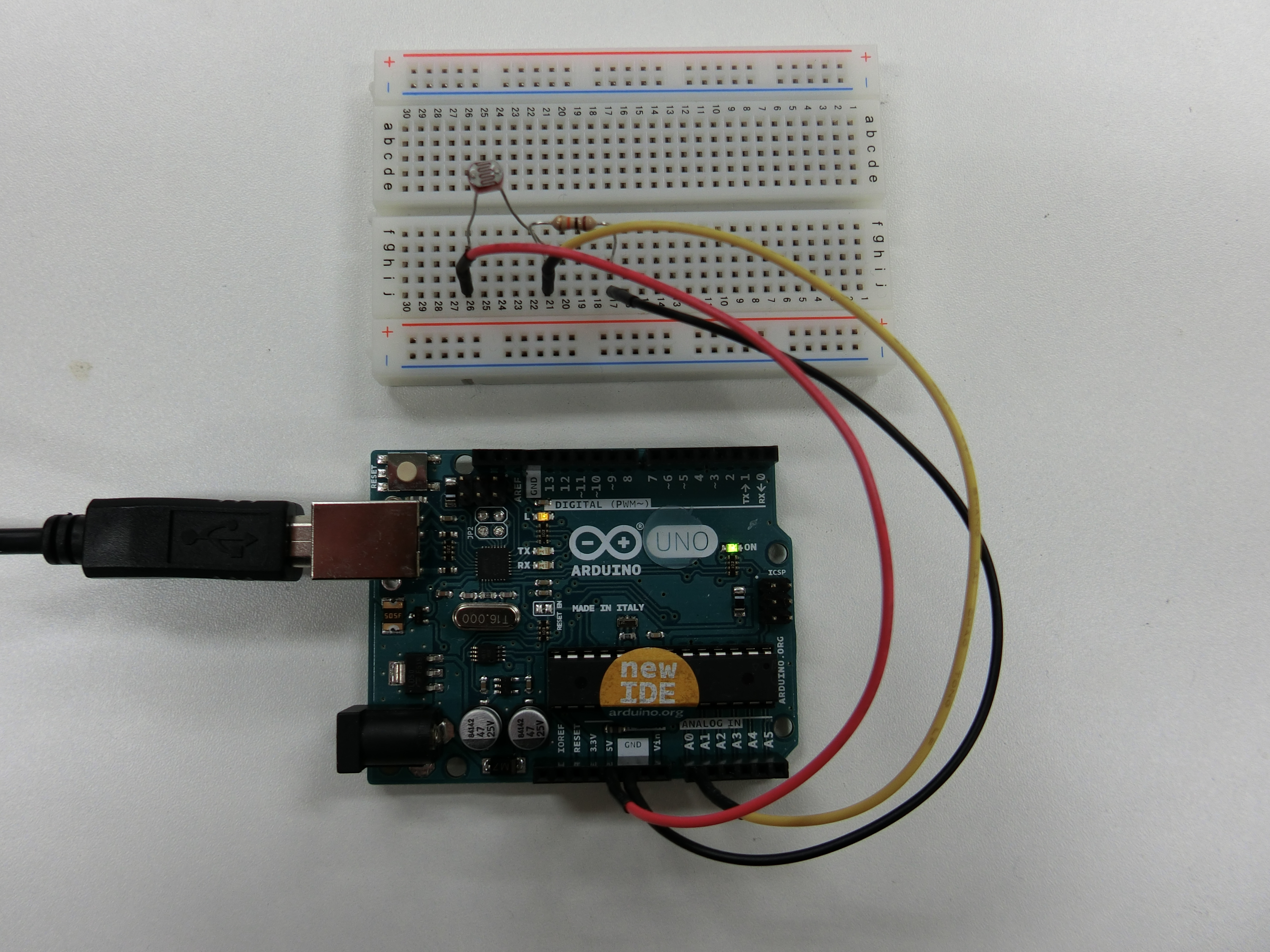
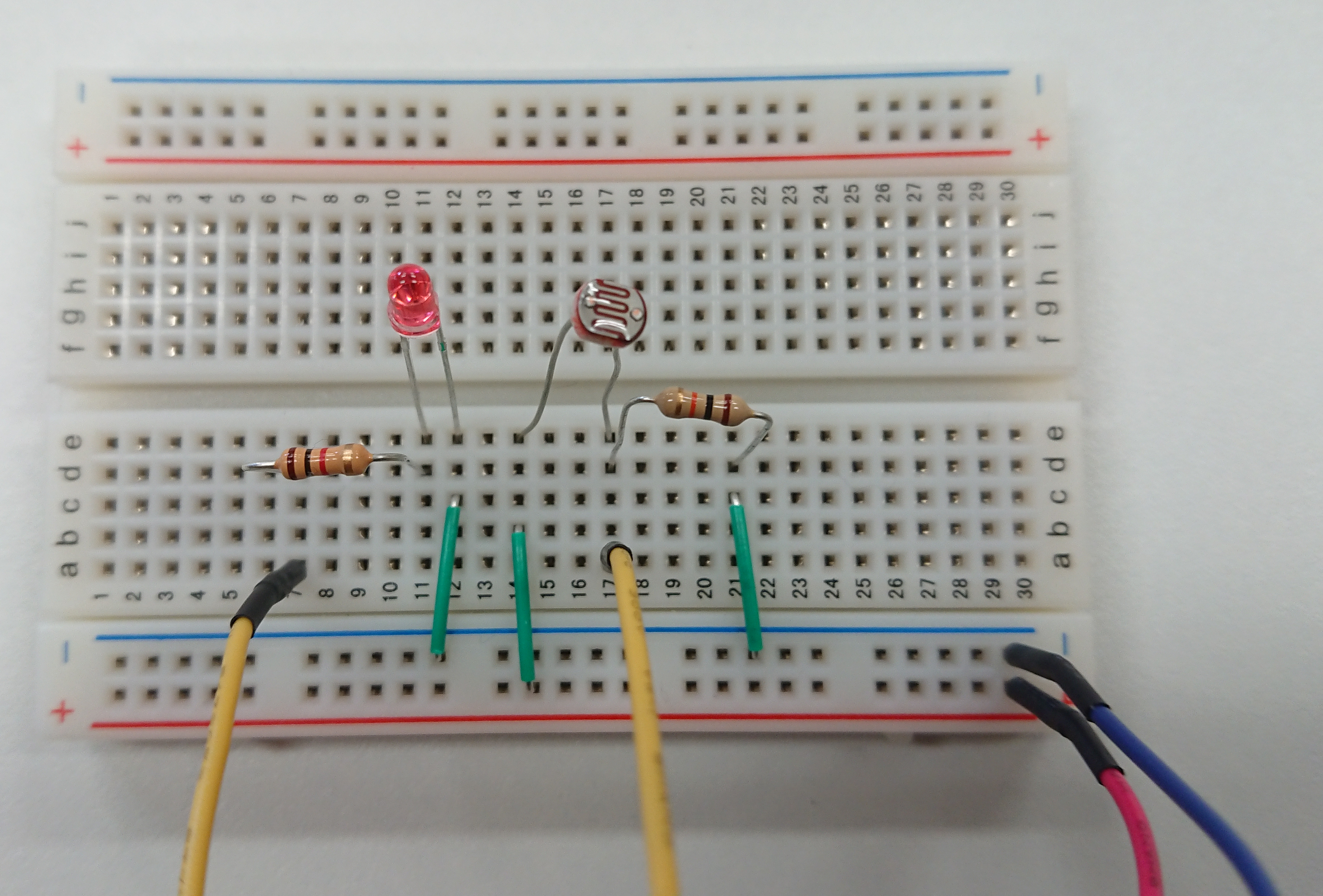
光センサ回路
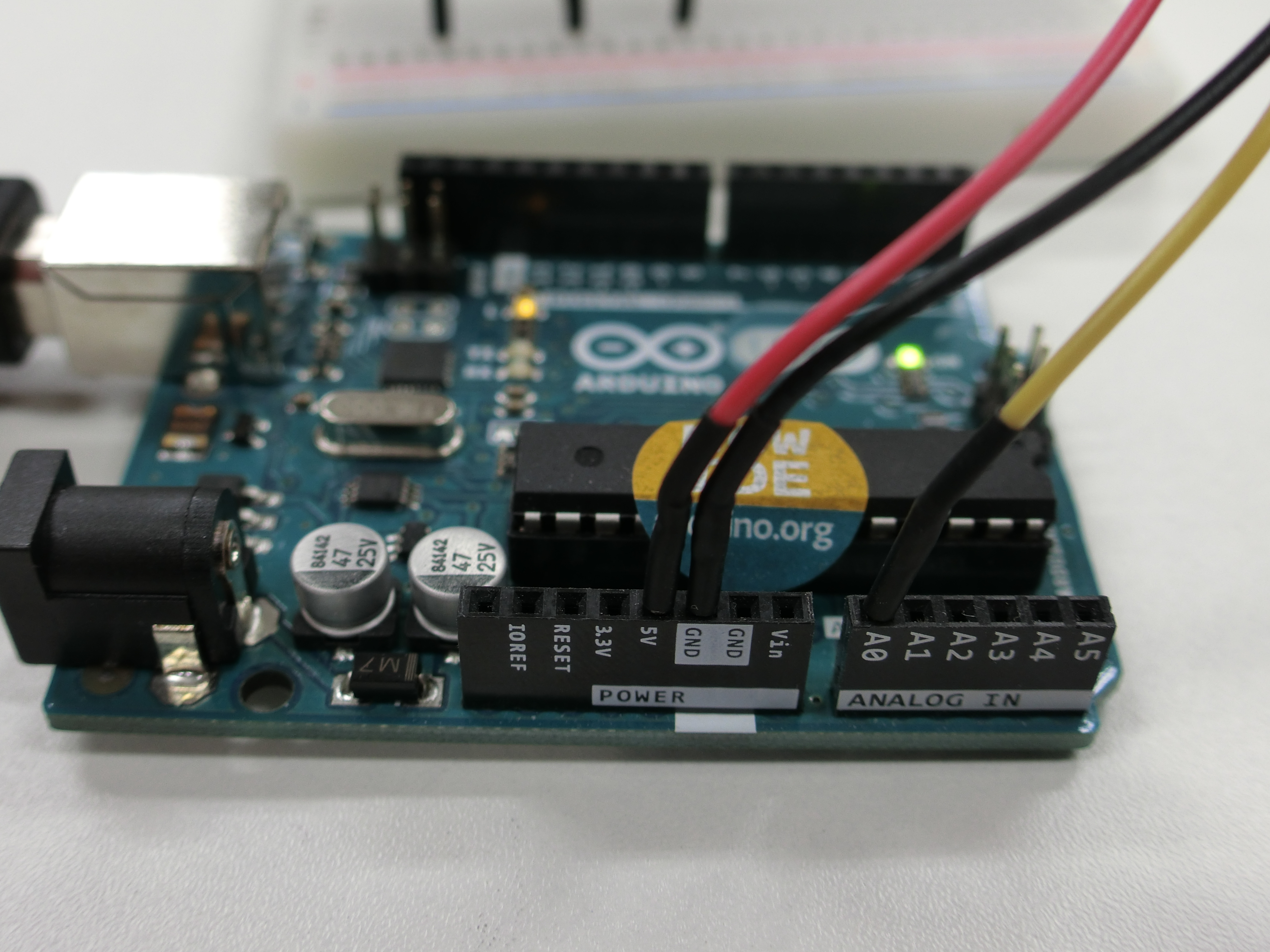
Arduino側
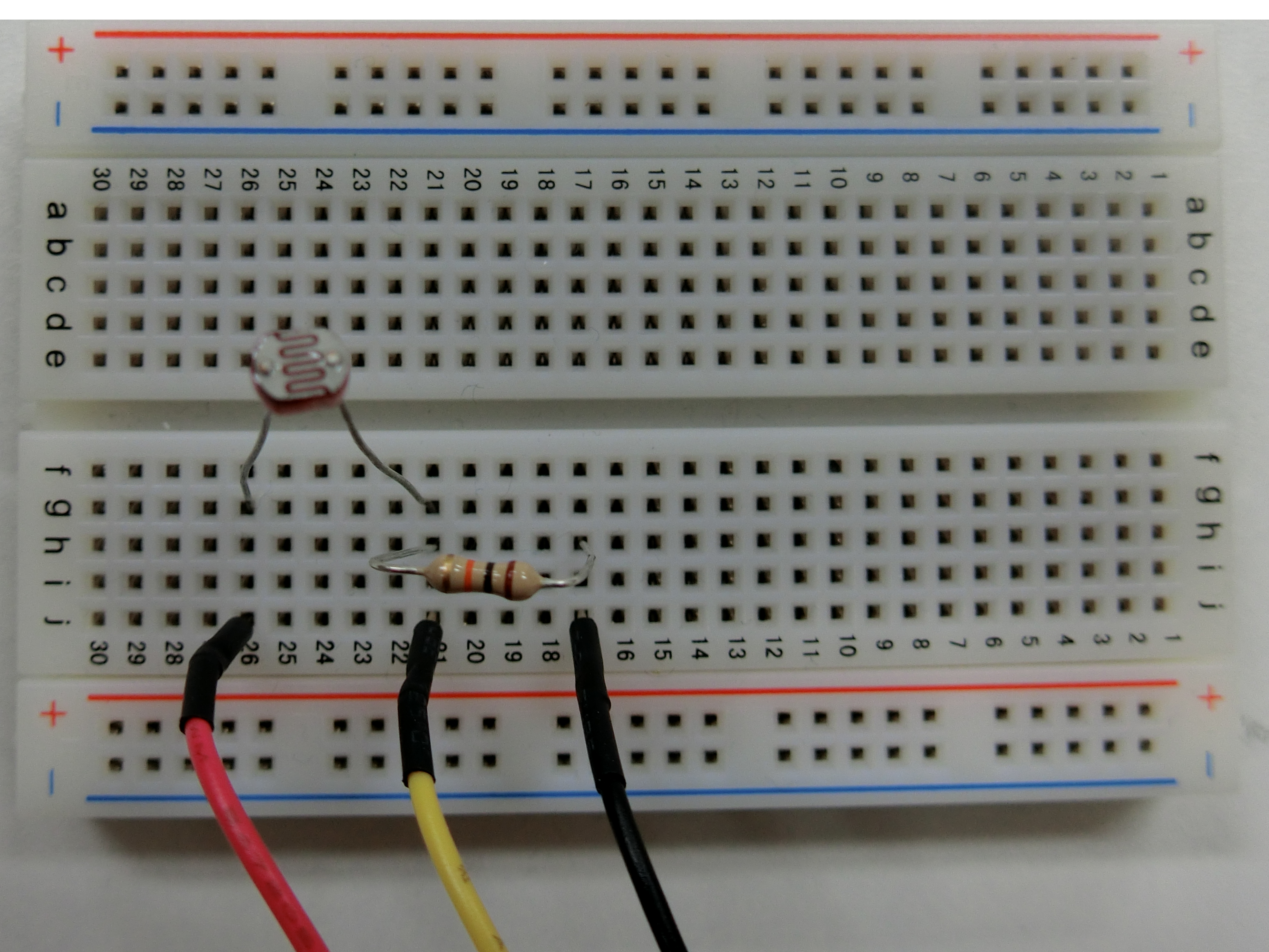
ブレッドボード側
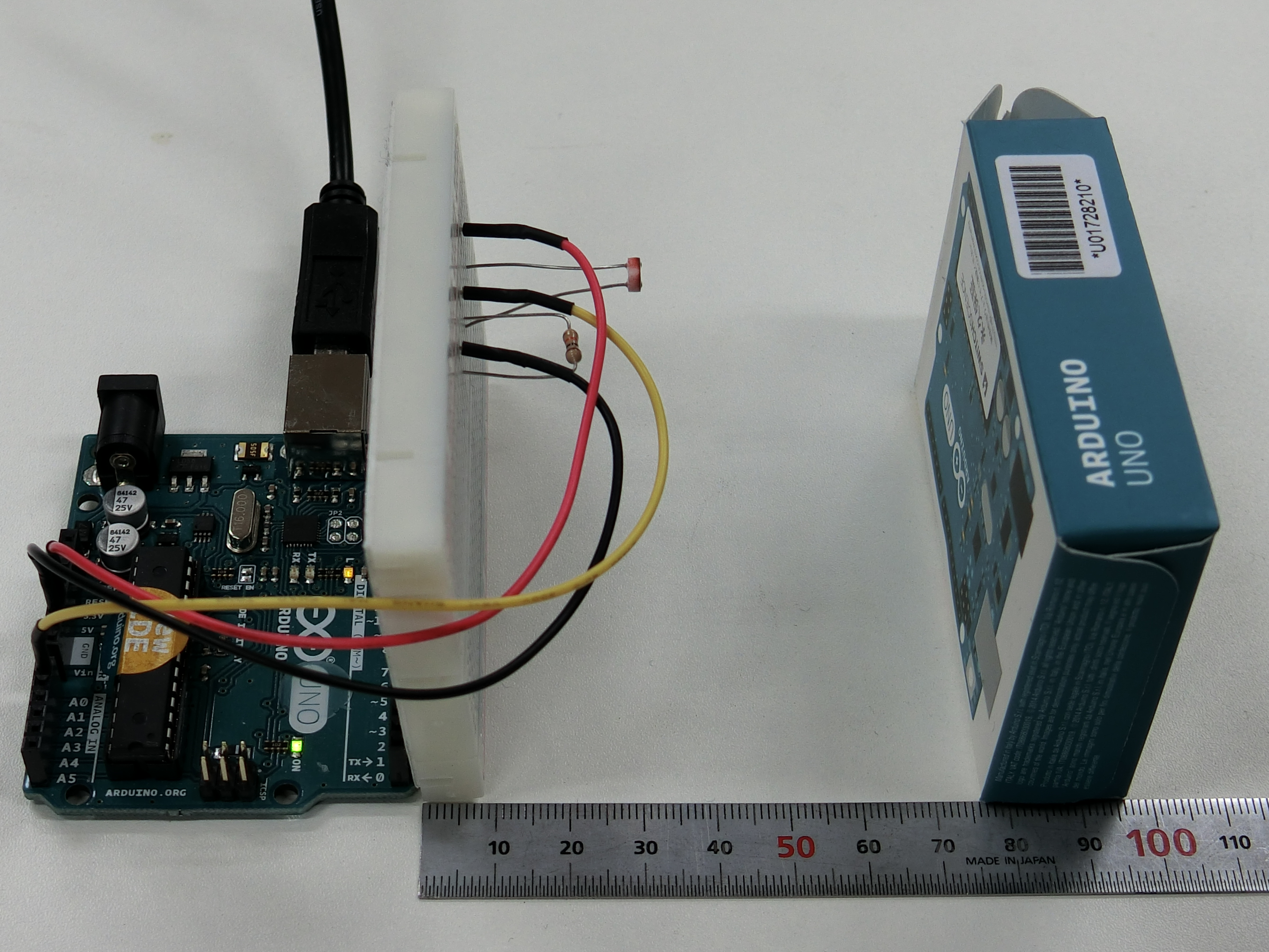
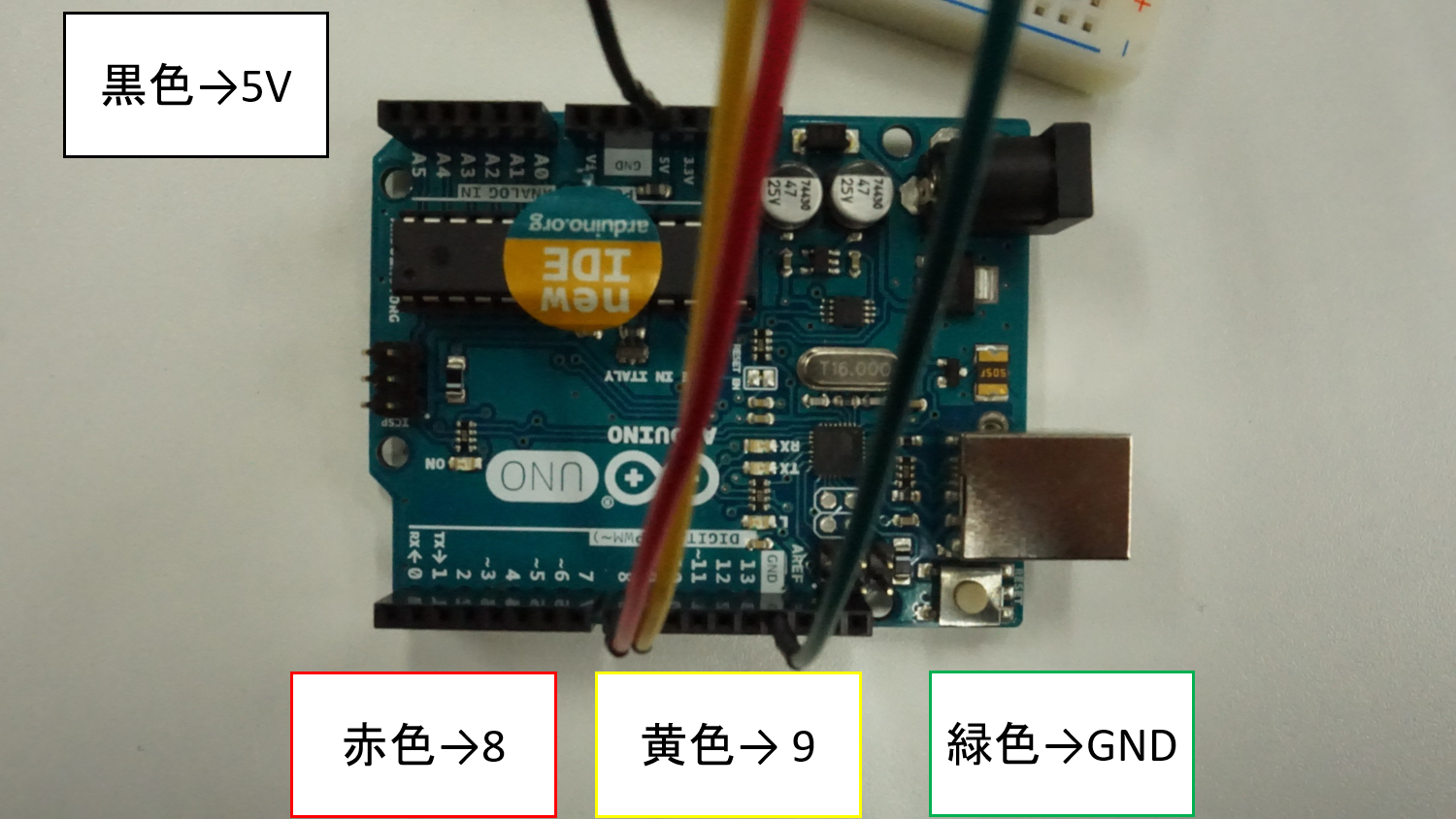
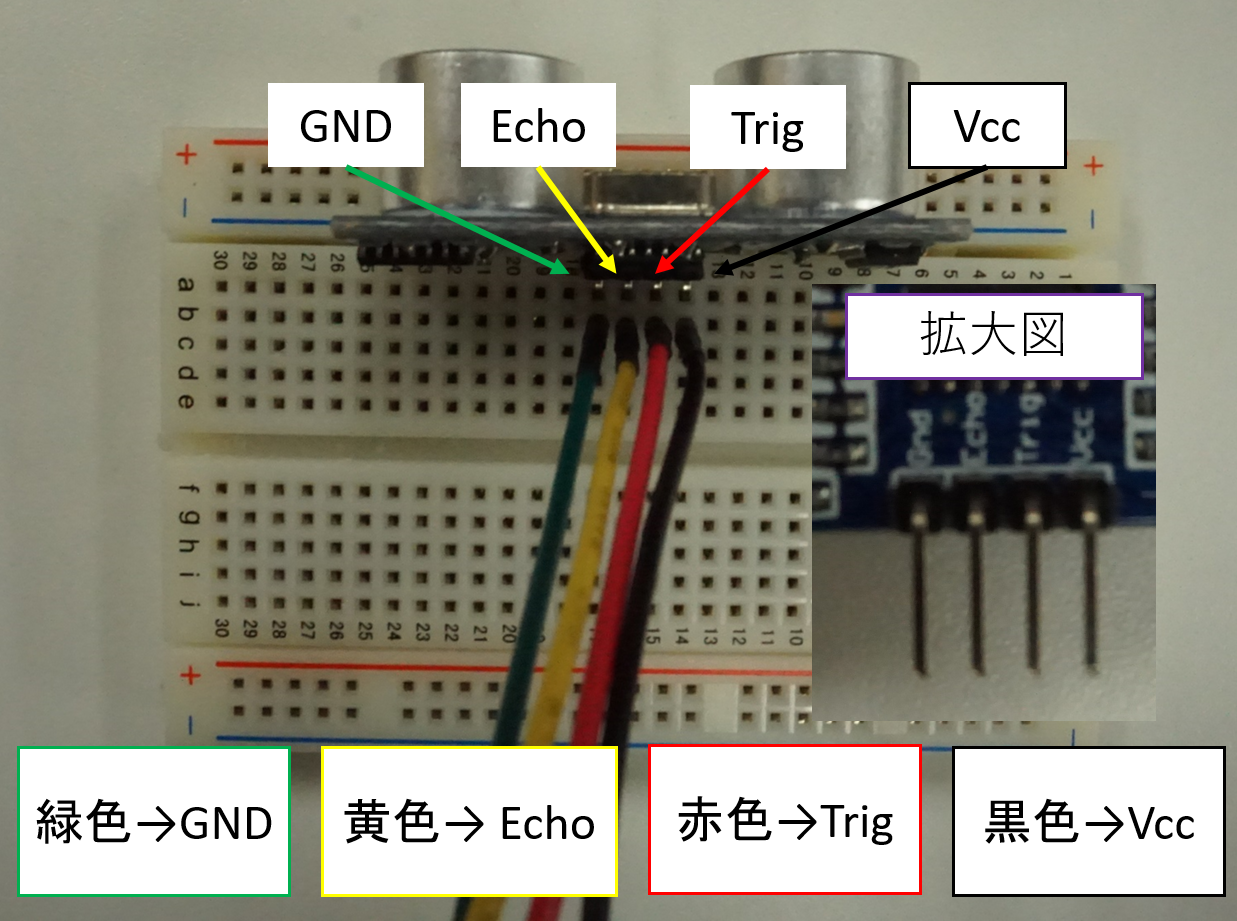
距離測定
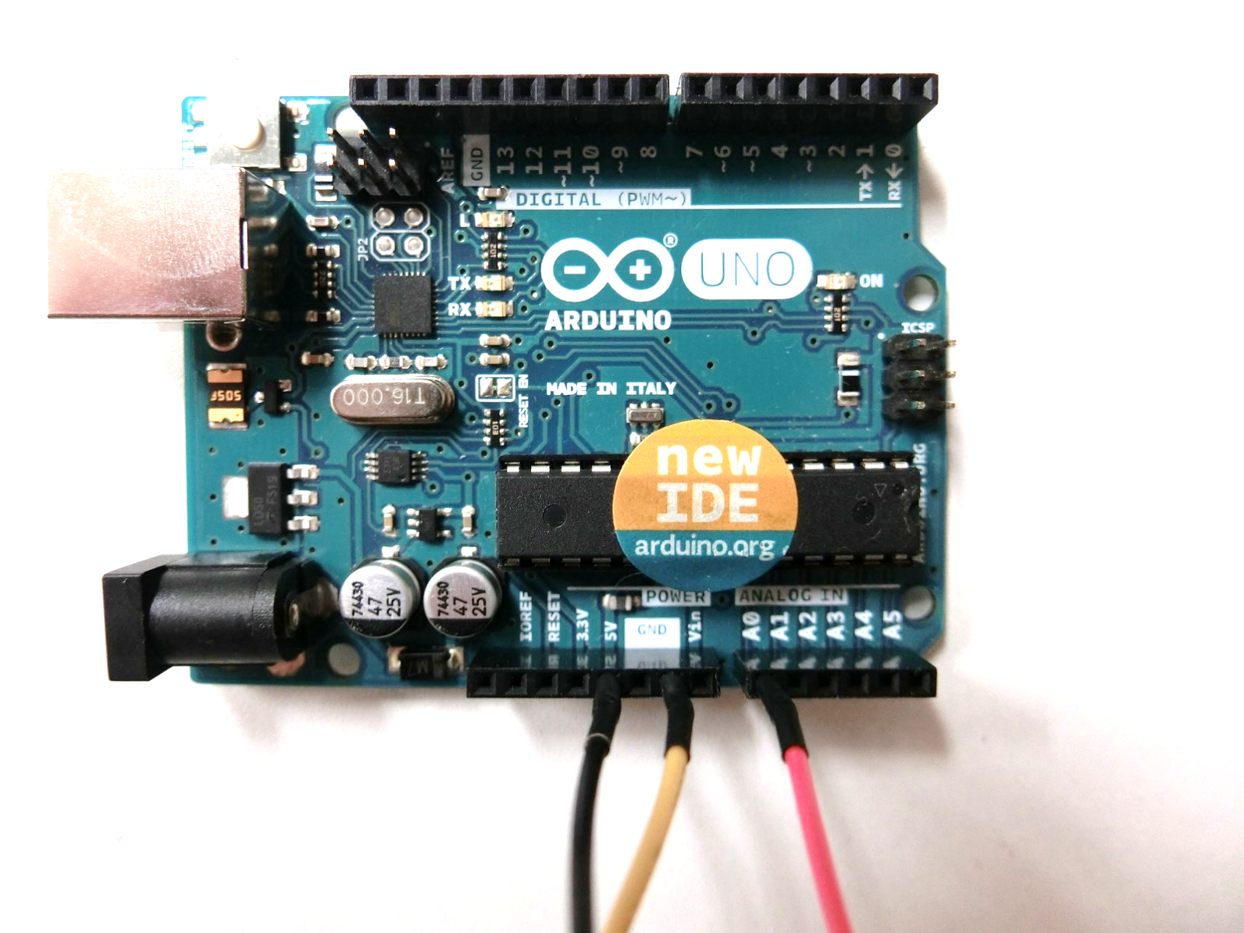
Arduino側
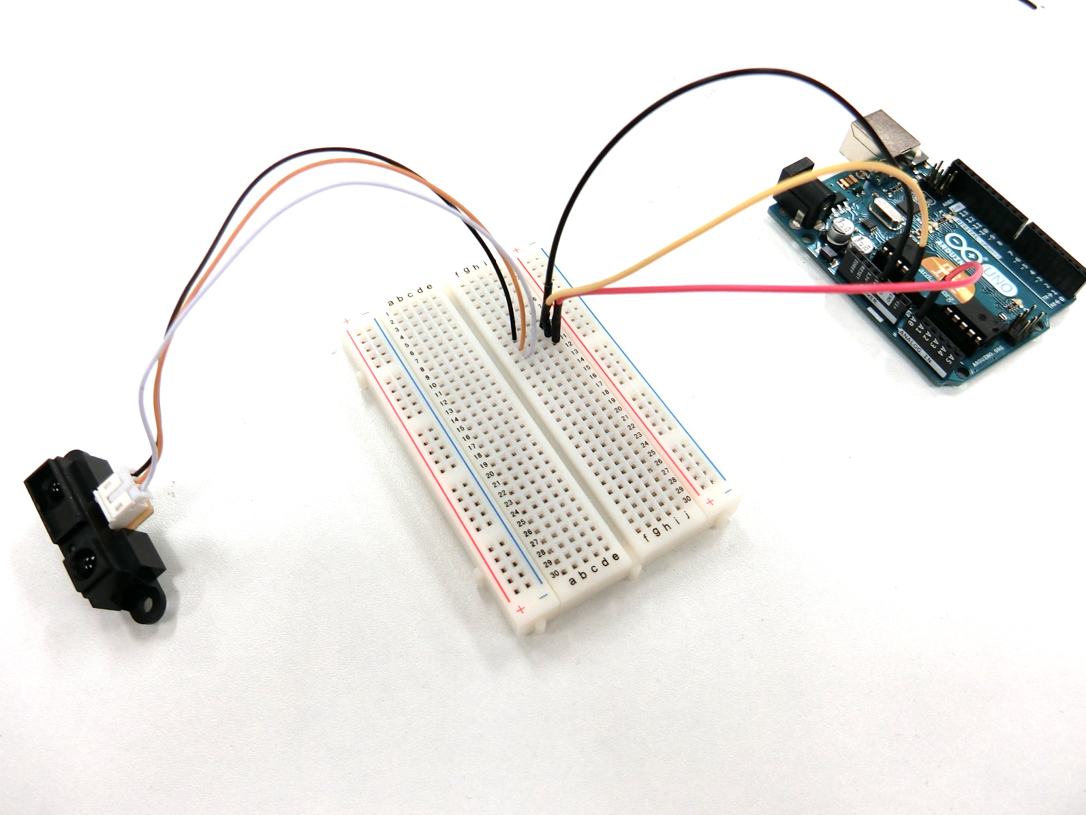
全体図
void setup() {
Serial.begin(9600) ; // 9600bpsでシリアル通信のポートを開く
}
void loop() {
int ans ;
ans = analogRead(0) ; // センサーから読込む
Serial.println(ans) ; // シリアルモニターに表示させる
delay(500) ; // 500ms時間待ち
}測距センサ
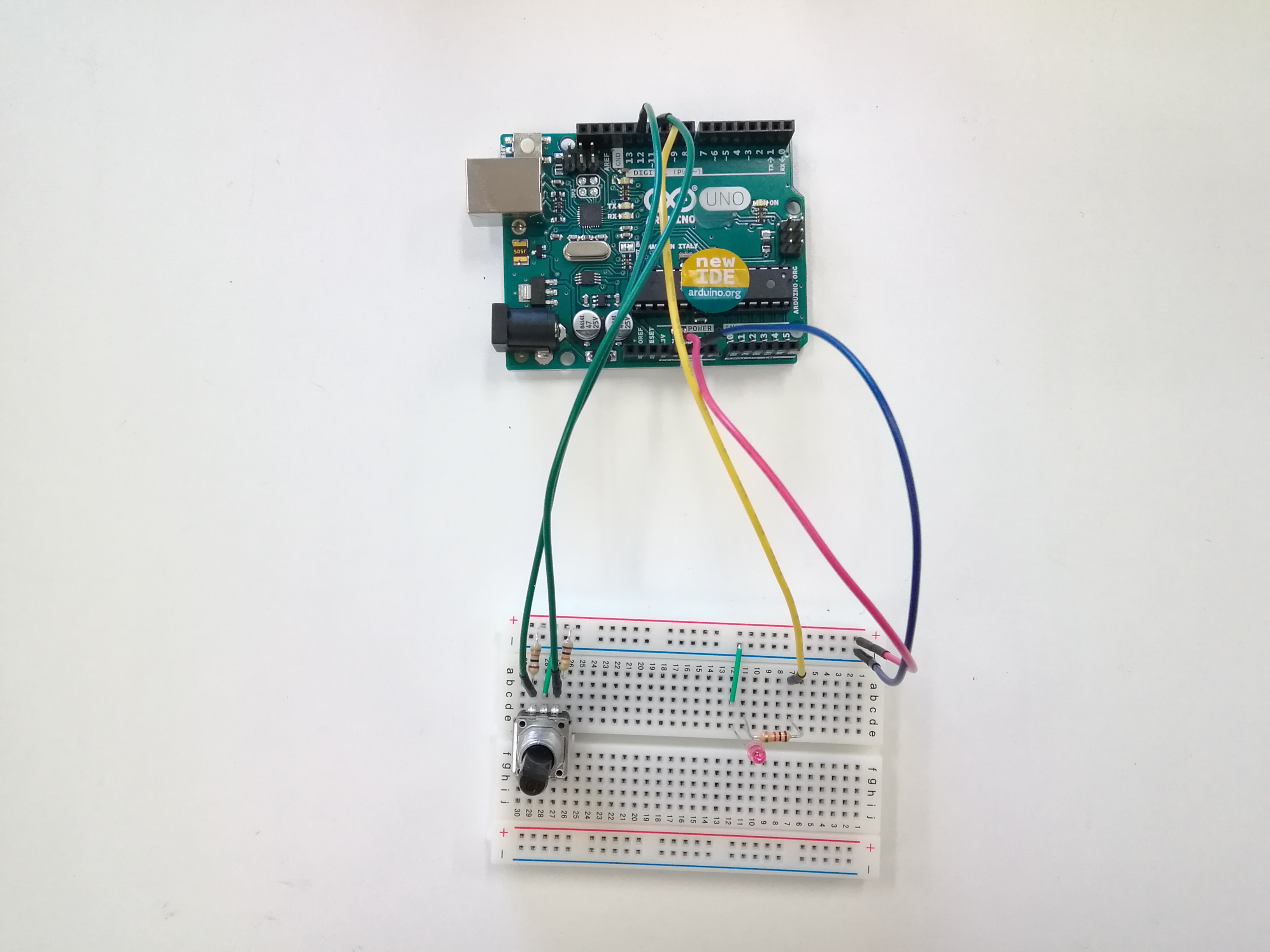
ロータリエンコーダ回路
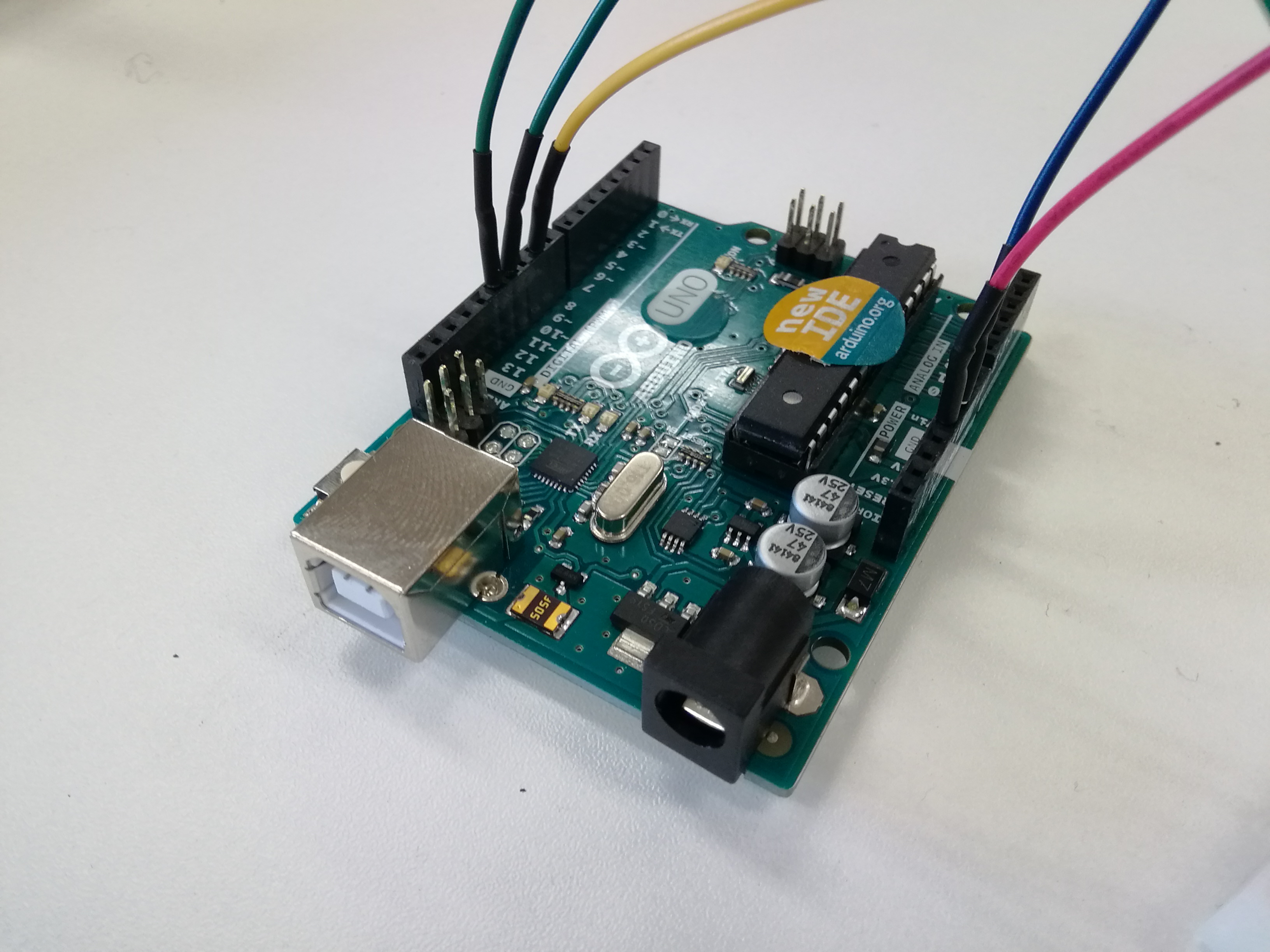
Arduino側
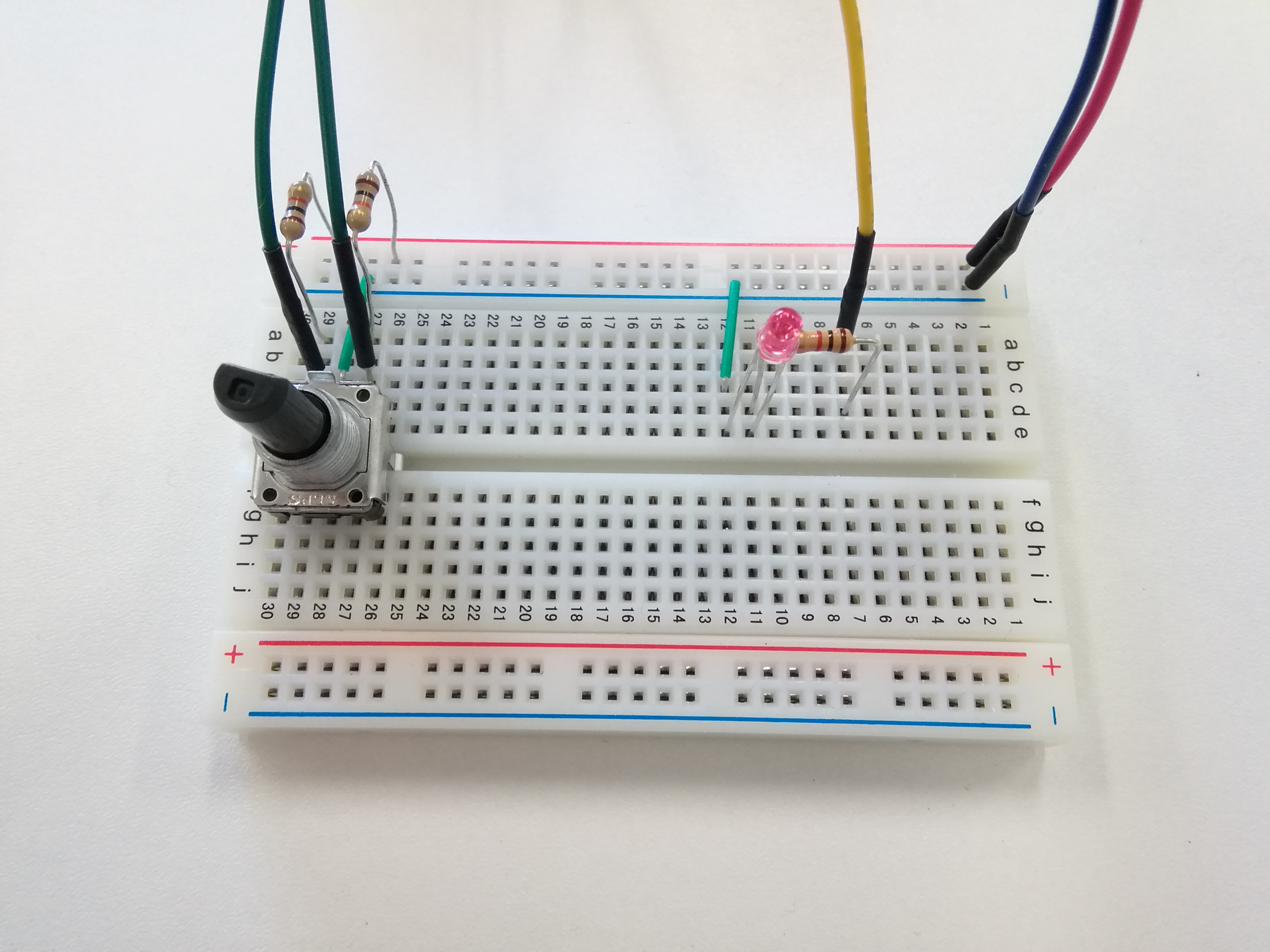
ブレッドボード側
ロータリエンコーダ(動画)
float count = 0;
unsigned long currentTime;
unsigned long loopTime;
const int pin_A = 11; // pin 11
const int pin_B = 12; // pin 12
unsigned char encoder_A;
unsigned char encoder_B;
unsigned char encoder_A_prev = 0;
void setup() {
Serial.begin(9600);
pinMode(9, OUTPUT);
pinMode(pin_A, INPUT);
pinMode(pin_B, INPUT);
currentTime = millis();
loopTime = currentTime;
}
void loop() {
currentTime = millis();
if (currentTime >= (loopTime + 5)) {
encoder_A = digitalRead(pin_A);
encoder_B = digitalRead(pin_B);
if ((!encoder_A) && (encoder_A_prev)) {
if (encoder_B) {
count += 1;
}
else {
count -= 1;
}
}
encoder_A_prev = encoder_A;
analogWrite(9, count);
Serial.print(count);
Serial.print('/n');
Serial.println(count * 15 / 360);
loopTime = currentTime;
}
}
起電力測定
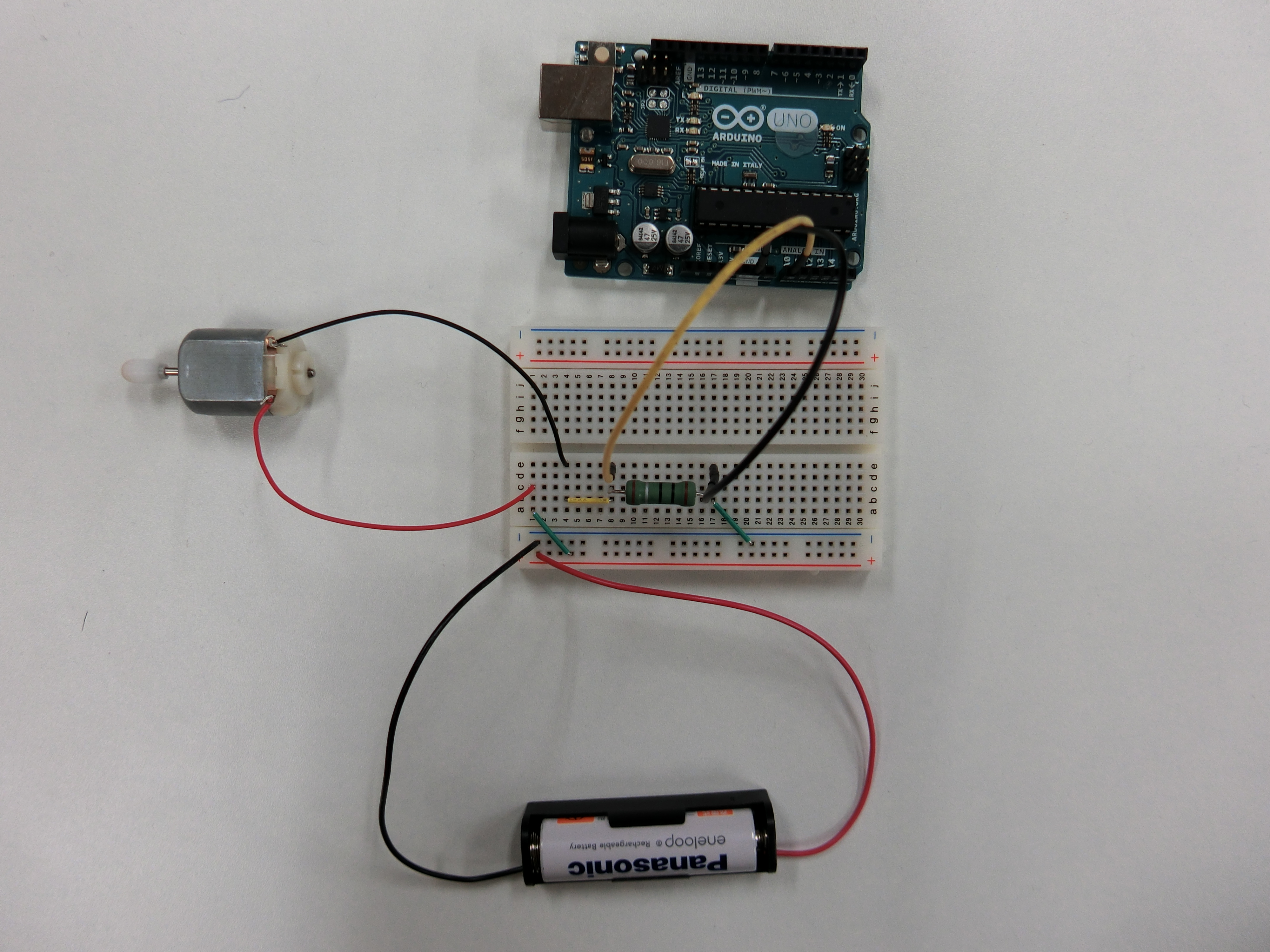
モータ回路
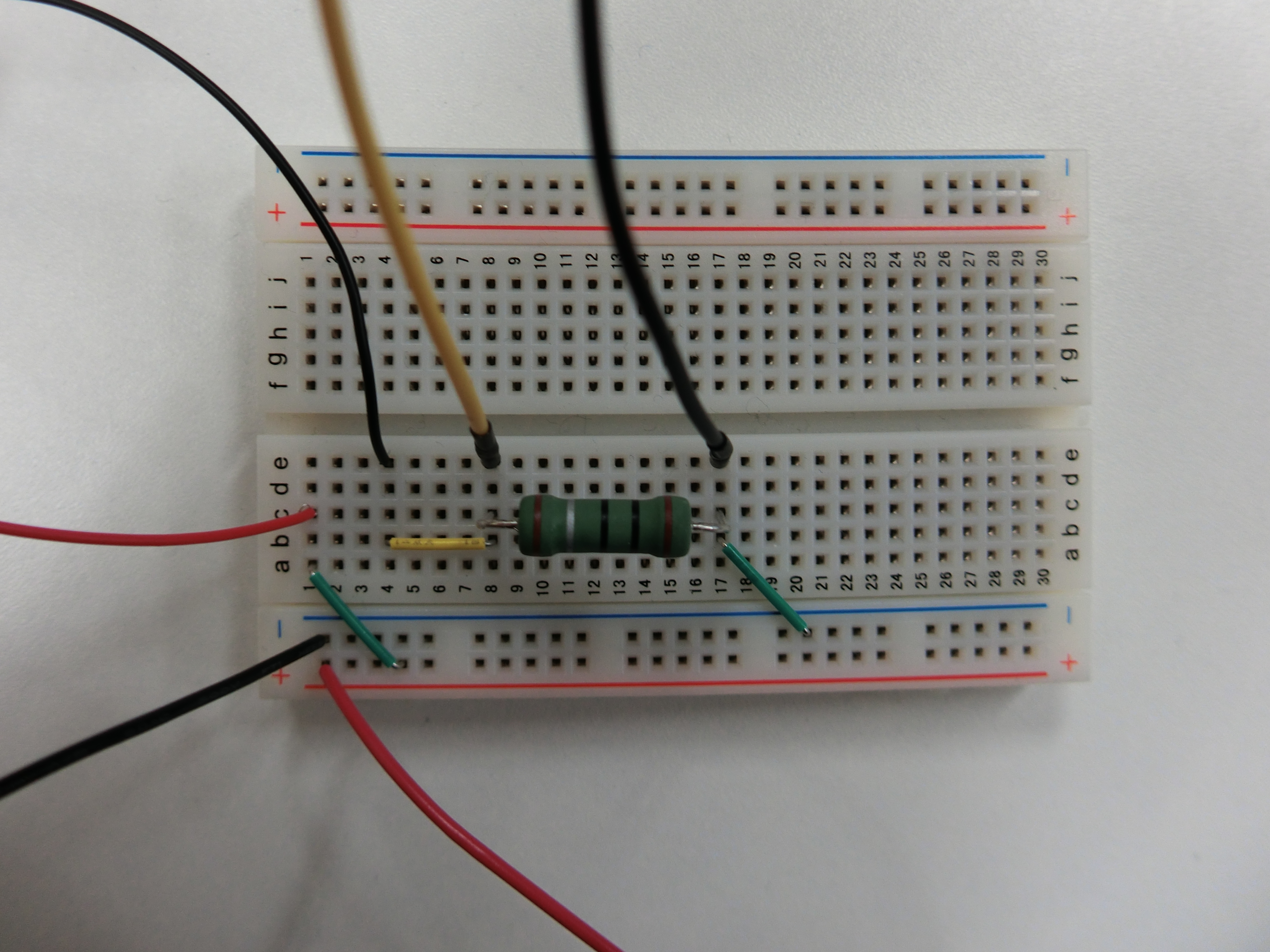
ブレッドボード側
float value;
float v2;
float v3;
float P;
void setup()
{
Serial.begin(9600);
}
void loop()
{
double value = analogRead(A0);
v2 = value * 5 / 1023 * 1000;
v3 = 1200 - v2;
P = v2 * v3;
Serial.print(value);
Serial.print(" ");
Serial.print(v2);
Serial.print(" mV ");
Serial.print(v3);
Serial.print(" mV ");
Serial.print(P);
Serial.println(" μW");
delay(1000);
}
起電力測定
Arduino側
ブレッドボード側
int Trig = 8;
int Echo = 9;
int Duration;
float Distance;
void setup() {
Serial.begin(9600);
pinMode(Trig,OUTPUT);
pinMode(Echo,INPUT);
}
void loop() {
digitalWrite(Trig,LOW);
delayMicroseconds(1);
digitalWrite(Trig,HIGH);
delayMicroseconds(11);
digitalWrite(Trig,LOW);
Duration = pulseIn(Echo,HIGH);
if (Duration>0) {
Distance = Duration/2;
Distance = Distance*340*100/1000000; // ultrasonic speed is 340m/s = 34000cm/s = 0.034cm/us
Serial.print(Duration);
Serial.print(" us ");
Serial.print(Distance);
Serial.println(" cm");
}
delay(500);
}