研究テーマ
研究テーマ
 インタラクションロボット インタラクションロボット |
窓コミュニケーションシステム |
| 画像処理を用いた識別システム |
機械学習のためのシミュレーション |
| スワームロボティックス |
自律走行型車椅子ロボットのナビゲーションシステム |
| 生物学的見地に基づくロボットの経路探索と自己位置推定 | |
インタラクションロボット
ロボットと人間が違和感なくコミュニケーションを取るために、人間同士の動作(握手・挙手・ハグ・抱きかかえ など)を計測し、人間に好まれるロボットの動作やタイミングを研究してます。 (ハグロボット概要PDF)





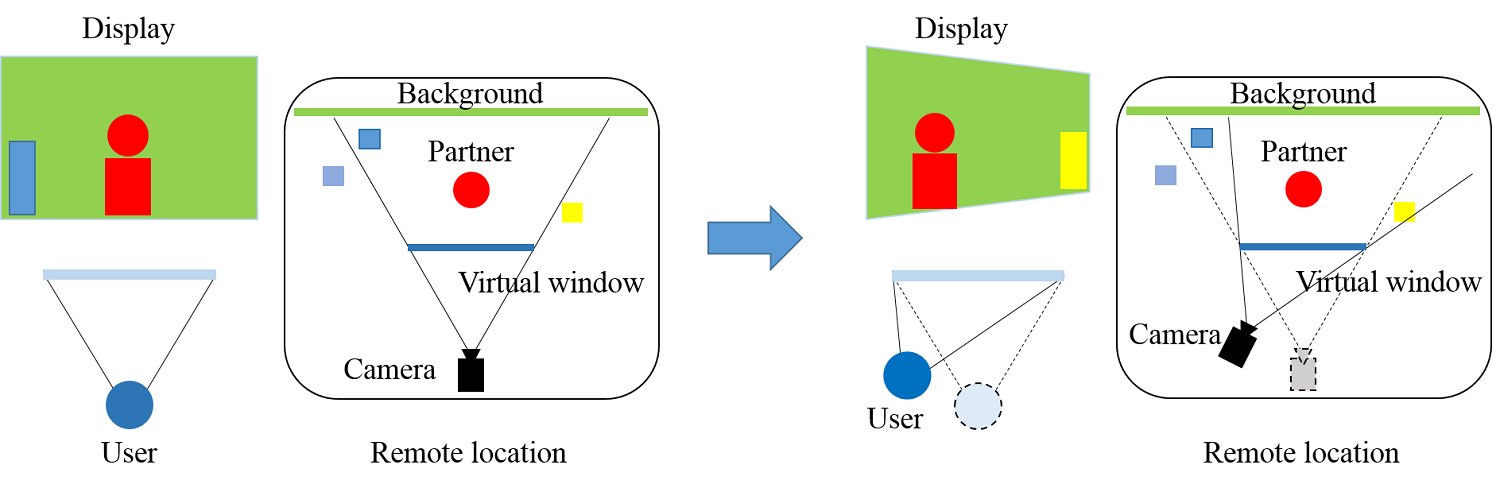
窓コミュニケーションシステム
遠隔コミュニケーションで奥行情報を含む映像を提示するために、対話者の頭部位置に基づく遠隔地の映像を表示する遠隔コミュニケーションシステムを研究しています。 (概要PDF)



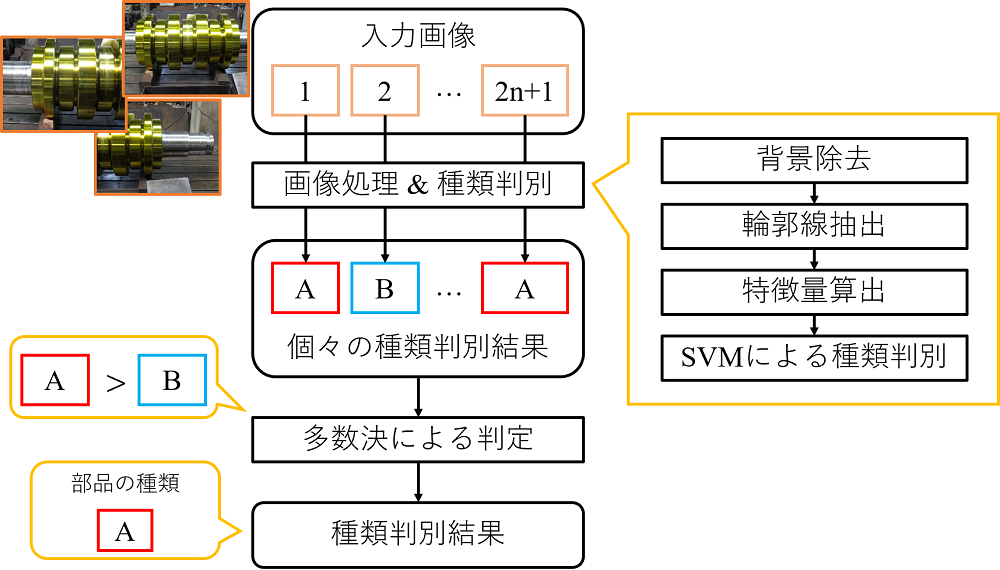
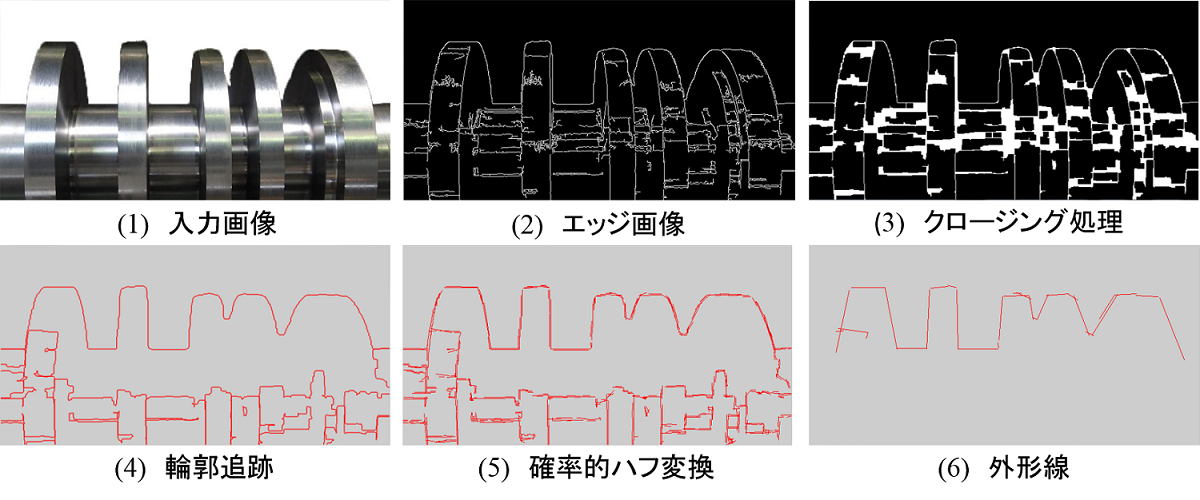
画像処理を用いた識別システム
大型部品の識別を行うために、大型部品の一部分を捉えた複数の画像から得られる特徴と3次元CAD情報とを比較することで対象物を識別するシステムについて研究しています。 (概要PDF)

スワームロボティクス
アリやハチなどが集団としてみせるような群知能のマルチロボットシステムへの応用として、進化・学習アプローチによる多数のロボットの行動生成手法について研究しています。また、ロボットの群れの操作手法や行動解析手法についても取り扱っています。

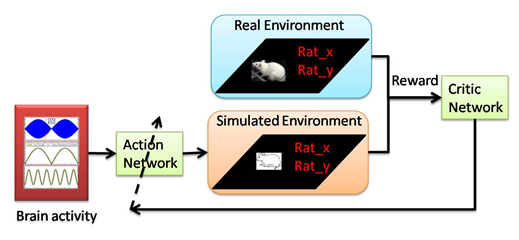
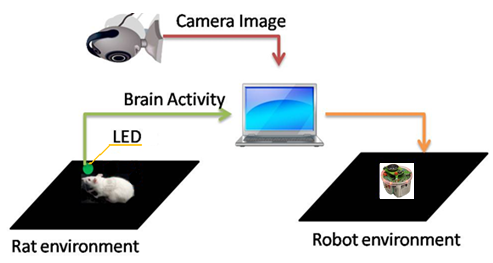
機械学習のためのシミュレーション
膨大な時間が必要な機械学習のためにシミュレーションを行い、高速化を図っている。シミュレーションでは、人間や動物の歩行支援のための歩行・走行などの周期的な運動や対象物を把持・運搬について研究しています。


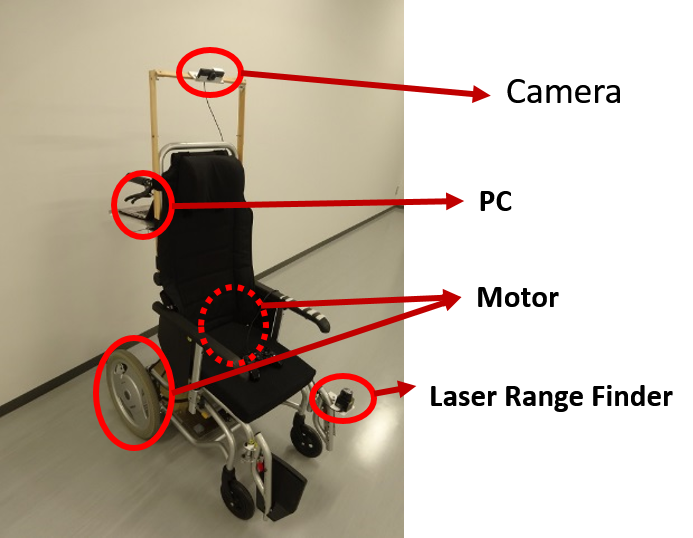
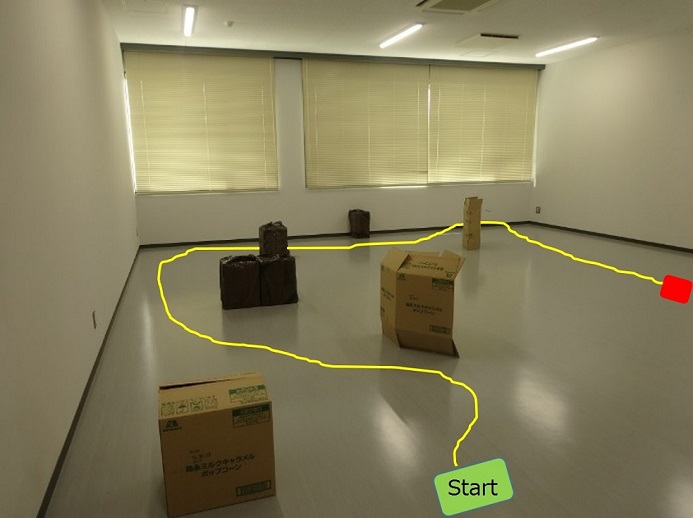
自律走行型車椅子ロボットのナビゲーションシステム
生活の質を向上させるために、日常生活で老人や障害のある方々の移動が困難となっている状況を解決できる複数のセンサを用いた人口知能アルゴリズムや画像処理による車椅子ロボットのナビゲーションシステムを提案しています。


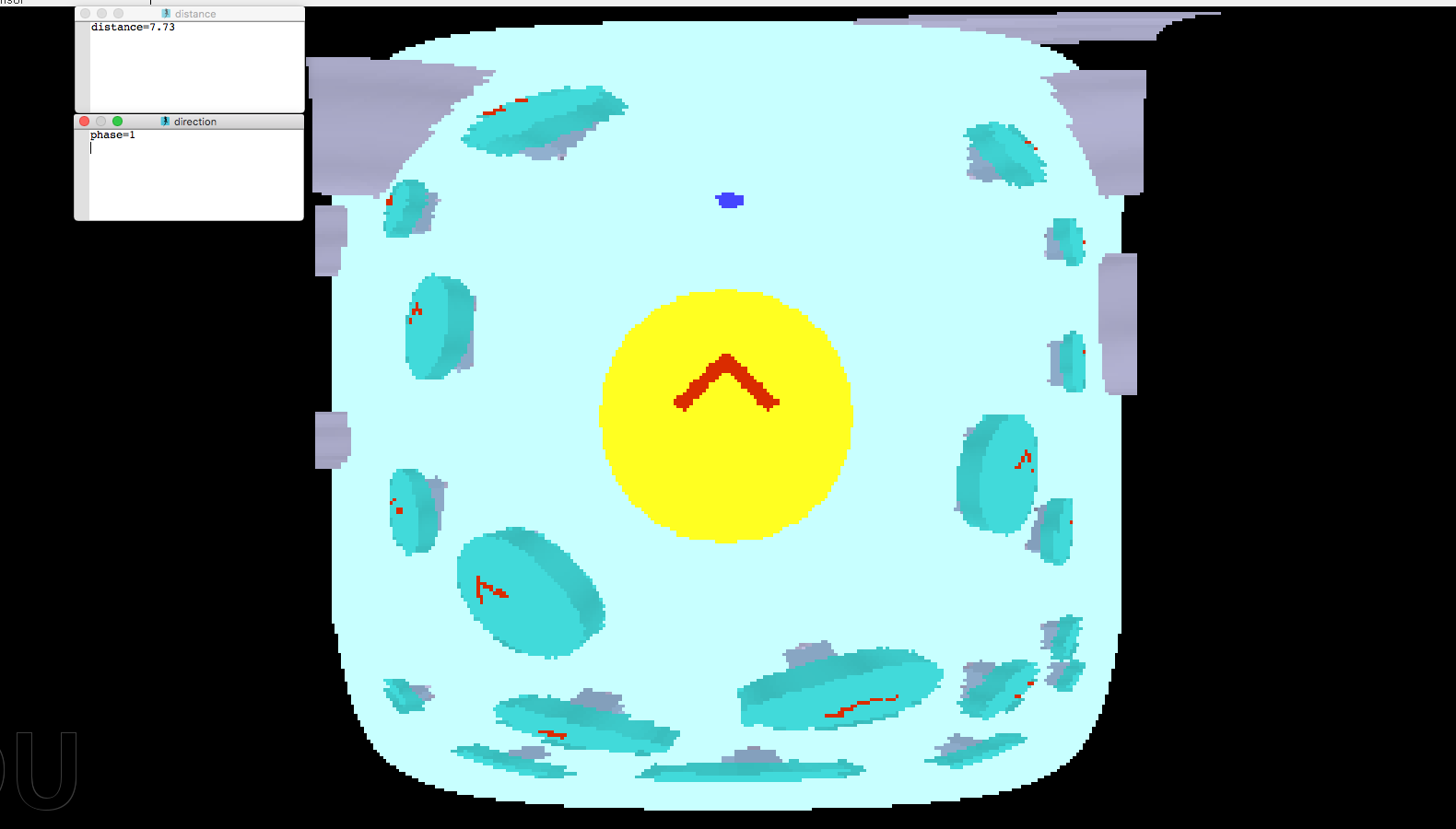
生物学的見地に基づくロボットの経路探索と自己位置推定
実際の日常生活において、様々なロボットでも環境に適応する、生物学に基づくロボットの経路探索と自己位置推定アルゴリズムを開発しています。