Research Theme
Research Theme

Interaction robot
In order to communicate between human and robot without discomfort, we measure the motion between humans by motion capture, such as hug, handshake, and raising hand, and then evaluate the behaviors and timings of robots which is preferred by human. (Lecture (PDF))





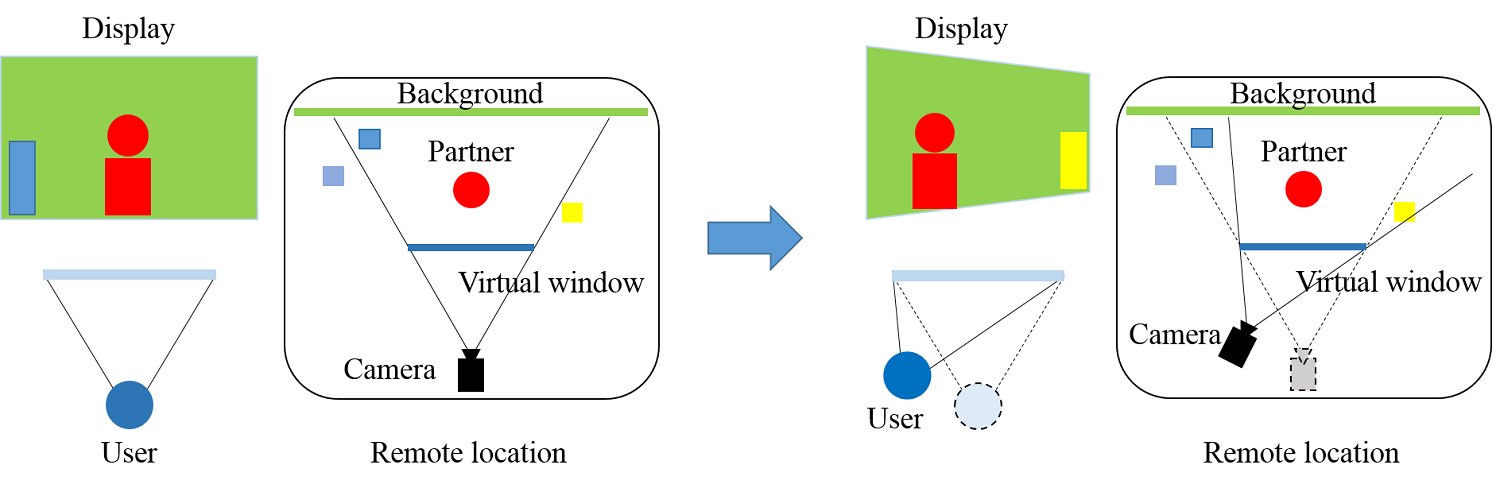
Window communication system
We do research on remote communication system which are able to display remote location with depth information based on the head position of the interlocutor. (Lecture (PDF))



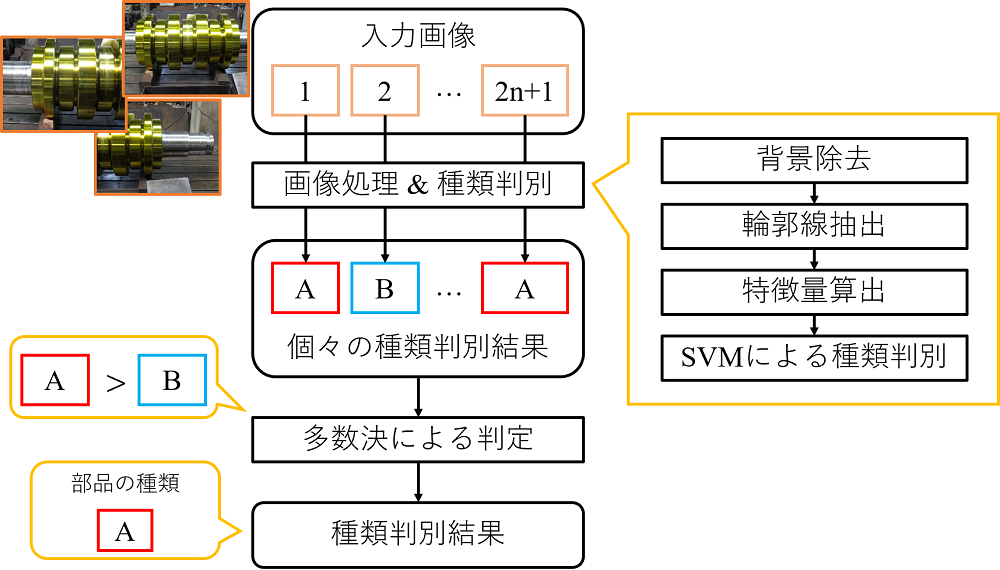
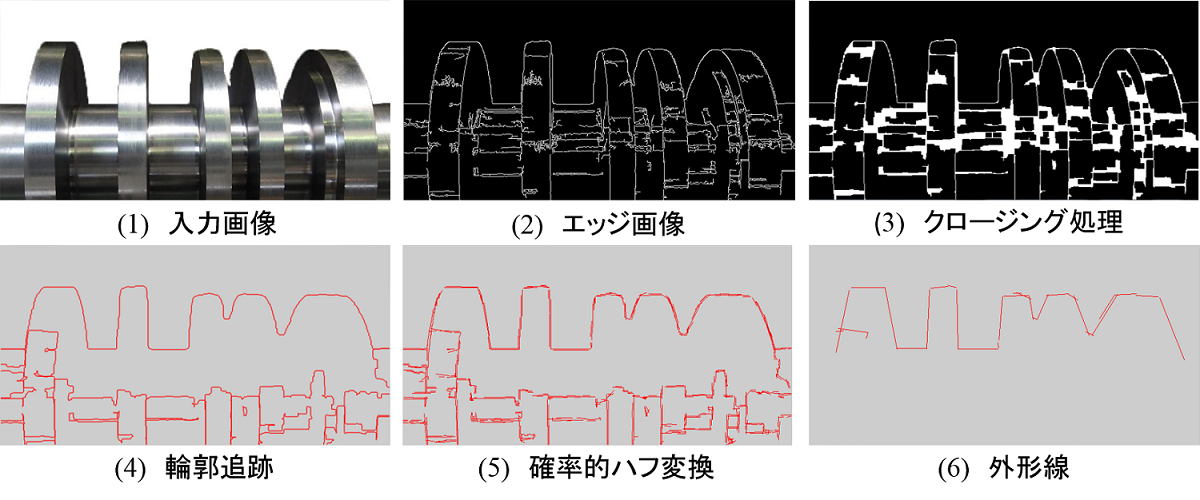
Identification system by image processing
In order to carry out the identification of the large parts, we do a research on a system for identifying the parts by comparing the partial image and the three-dimensional CAD information of the target component. (Lecture (PDF))

Swarm robotics
We pursue mechanisms to generate adaptive behavior in cooperative swarm robotic systems by means of evolutionary and learning approaches. Besides, our interests include swarm behavior analysis and human-swarm interactions.

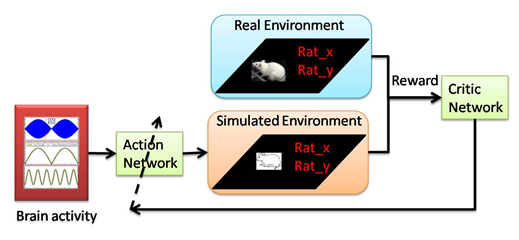
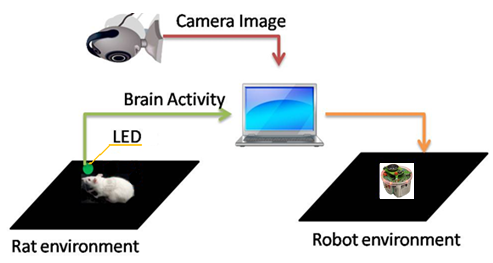
Simulation for machine learning
Simulation is performed for machine learning which requires enormous amount of time to achieve high speed. In the simulation, we are researching periodic exercise such as walking and running for supporting walking of human beings and animals, as well as grasping and transporting objects.


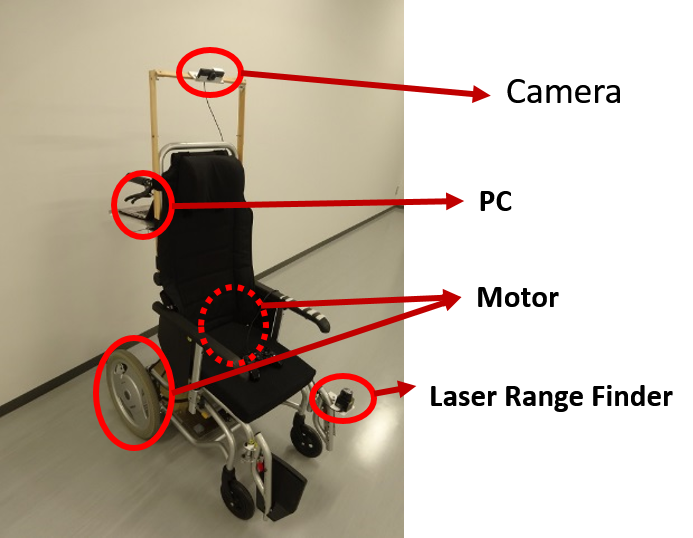
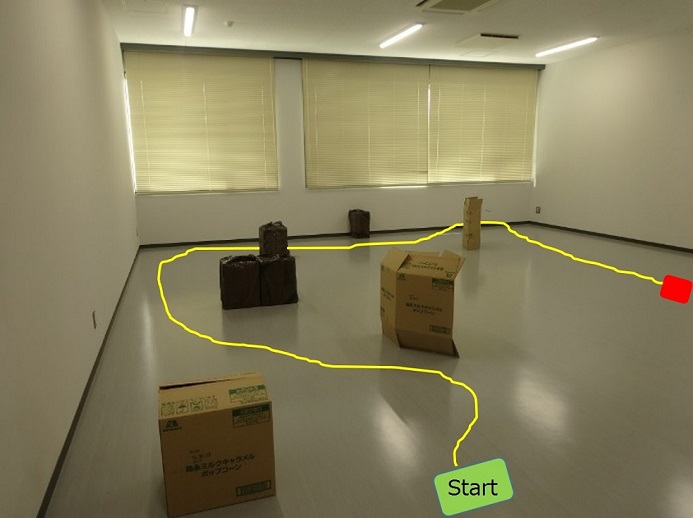
Navigation systems based wheelchair robot
In order to improve the quality of life, we propose an artificial intelligence algorithm with multiple sensor and image processing to navigate the wheelchair robot, which can help disabled or ageing people to solve immobility problems in their daily life.


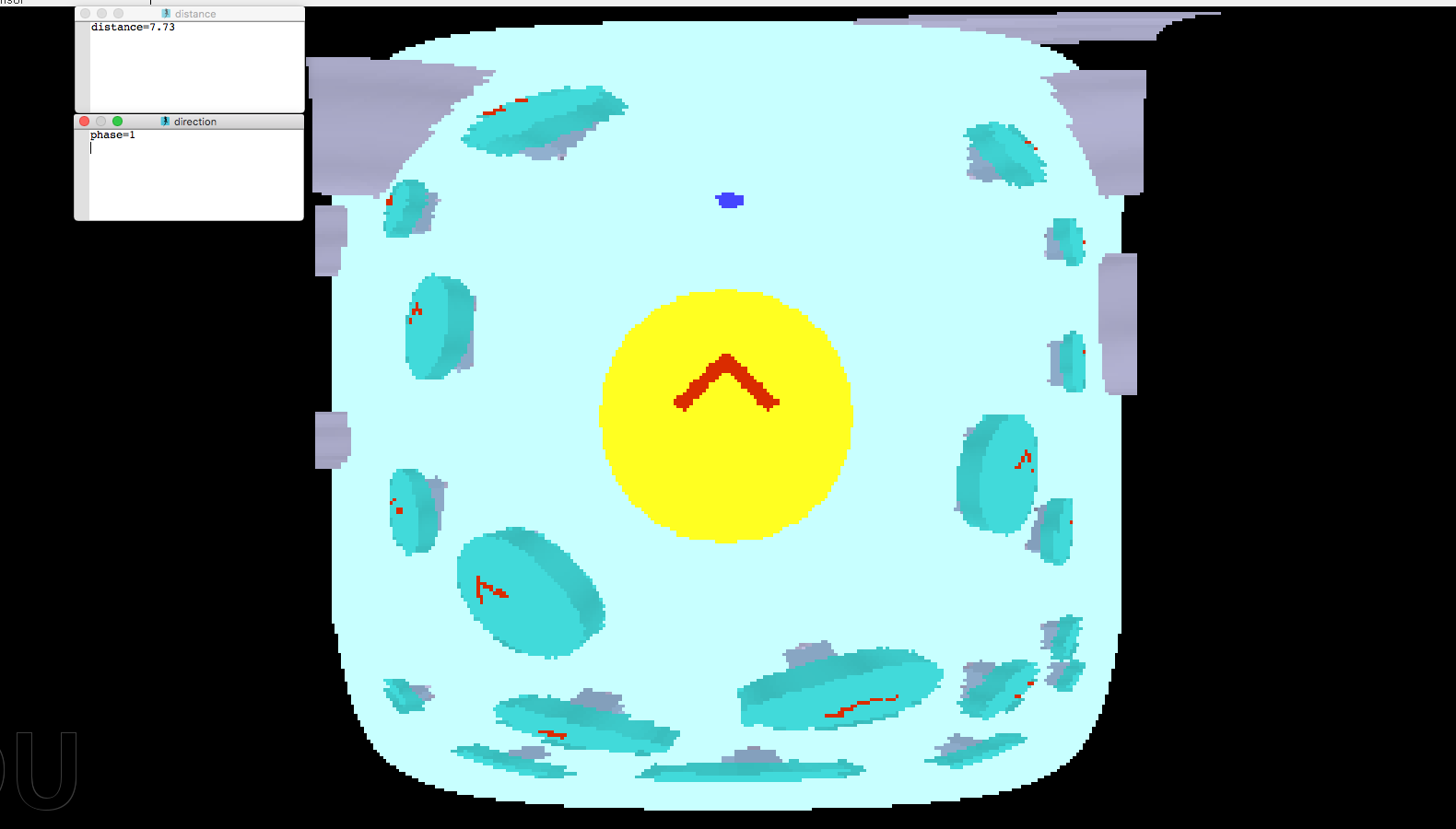
A Novel Biological Biased Method for Robot Navigation and Localization
The purpose is to develop a biologically based robot localization and navigation algorithm in real life environments, an algorithm which can be easy modified for different types of robots and environments.